
M2600 ECO CAN PLC
go to order options (1261x)
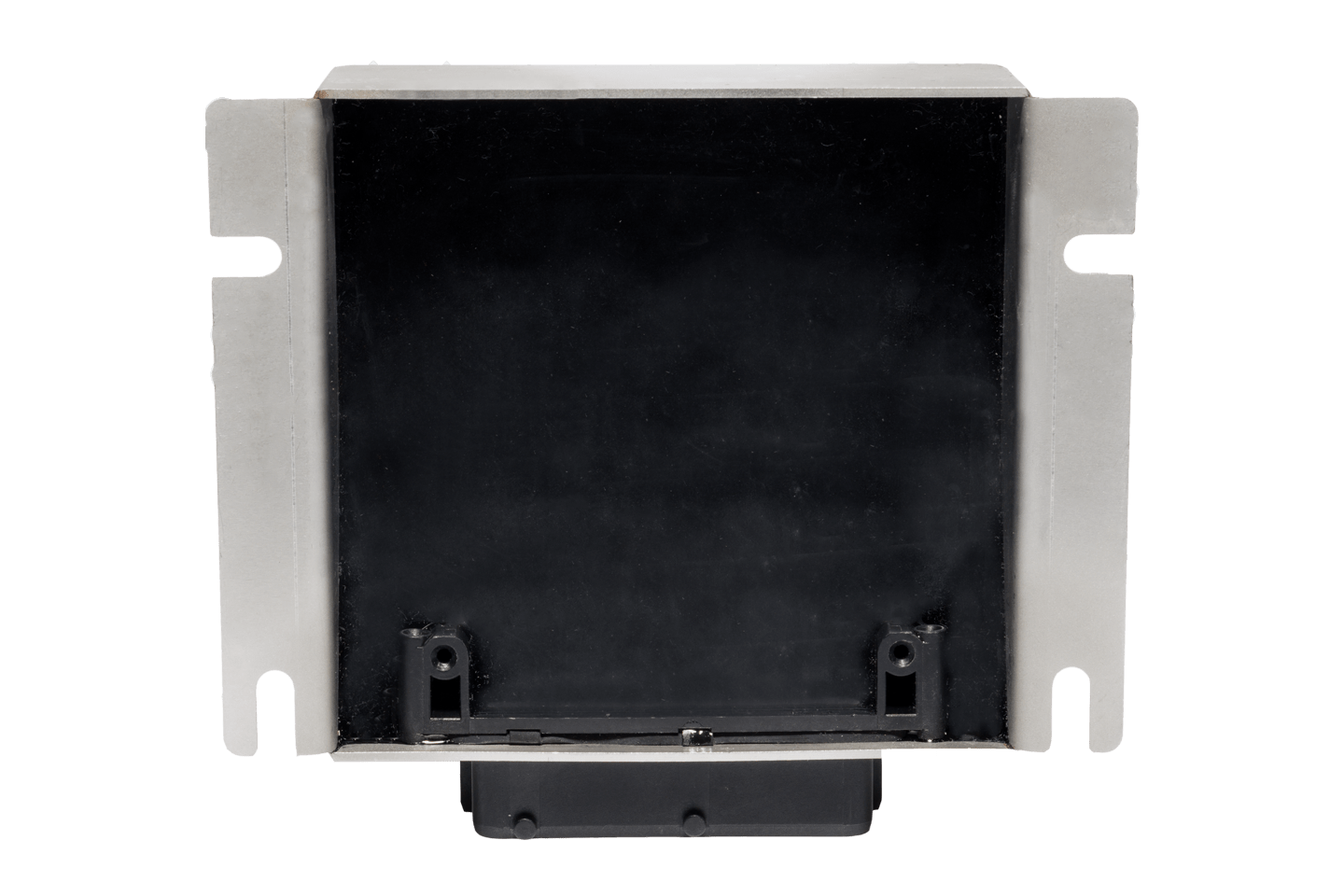
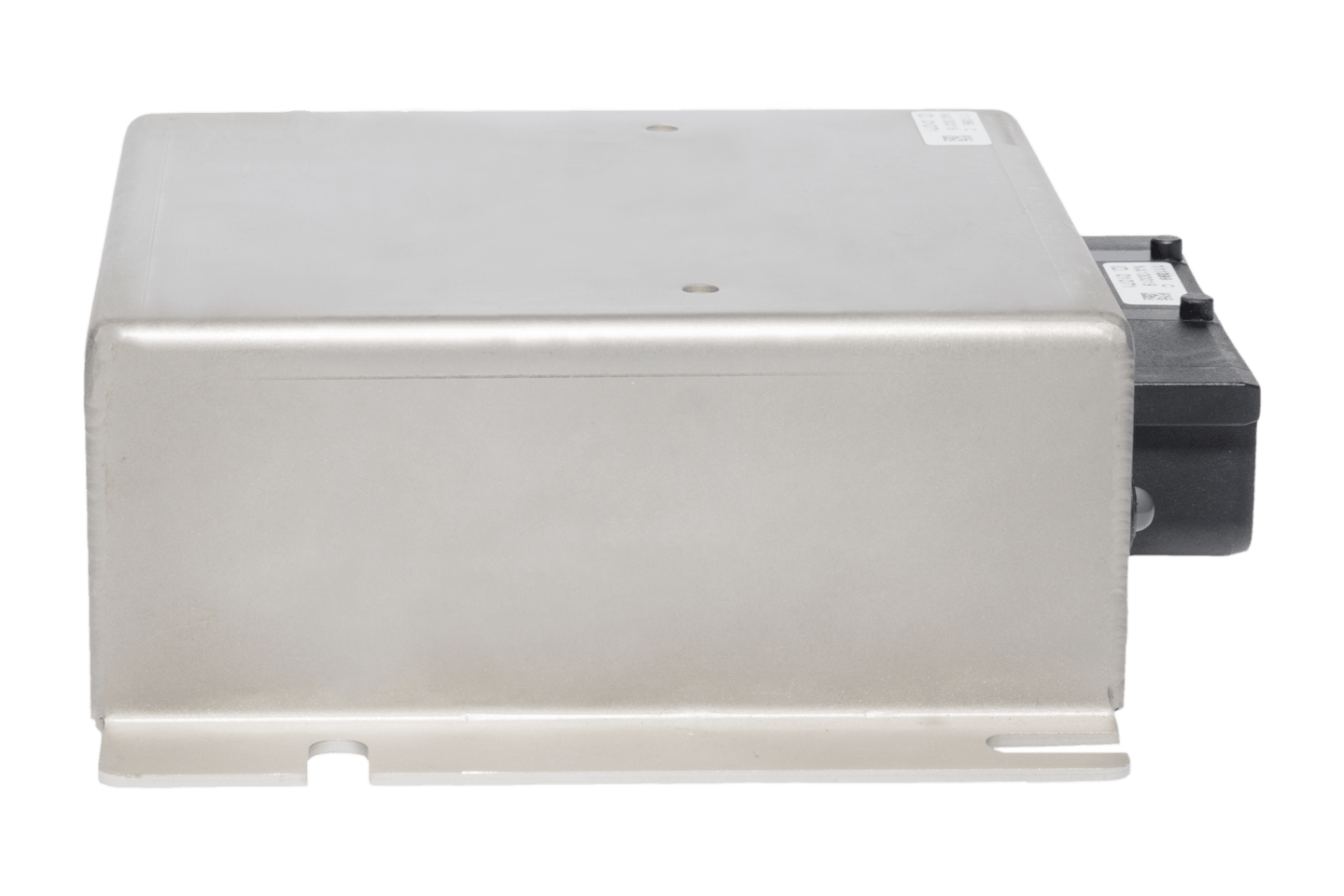
The compact M2600 ECO CAN PLC is a high-performance control with a high functionality in a robust V2A half-shell. The MRS-Controller has eight current-controlled PWM outputs. In addition to the 16-bit main microcontroller, the special feature is the second additionally integrated microcontroller (8-bit processor) with a useful watchdog function. Due to the two CAN-Bus interfaces, a gateway function is possible in addition to the typical control function. Optionally, even a third CAN-Bus interface can be used for further functions.









Technical details
Inputs and Outputs
| Number of pins | 42 |
|---|---|
| In-/Outputs (total) | 26 |
| Inputs (total) | 14 |
| Inputs (analog) | 8 |
| Inputs (digital) | 6 |
| Outputs (total) | 4 |
| Outputs (digital) | 4 |
| I/Os (total) | 8 |
| I/O (Output PWM capable, integrated current measurement INA) | 8 |
| Output type high side | 12 |
| Switching current | 3 A @ 85°C |
Interfaces
| CAN interface(s) | 3 |
|---|
Mechanical Properties
| IP rating | IP65 |
|---|---|
| Housing material | V2A |
| Dimensions | 150 × 110 × 45 mm |
Programming
| Programming software | MRS Applics Studio |
|---|
General
| Temperature range | -40 to +85°C |
|---|---|
| Operating voltage | 9-32 V |
| Current consumption | < 100 mA |
| Vref current limit | 500 mA |
| Processor architecture | 16 bit |
Markings
Order options
| Order no. | Name |
|---|---|
| 1.261.300.00 (126130000) |
2x CAN High-Speed, RTyp B, RS232 Interface
|
| 1.261.303.00 (126130300) |
3x CAN High-Speed
|


Contact
Would you like to learn more or are you looking for a specific product?
Then please feel free to contact us.